
Mostrando entradas con la etiqueta robot. Mostrar todas las entradas
Mostrando entradas con la etiqueta robot. Mostrar todas las entradas
domingo, 27 de febrero de 2022
viernes, 18 de febrero de 2022

sábado, 2 de octubre de 2021
Programacion del Ev3 y organizacion de salidas
Hoy hemos preparado los tres ordenadores para poder trabajar de forma conjunta en la programacion y organizacion del proyecto. Tambien hemos empezado a programar y organizar las primeras tres salidas, creando varios artilugios para ayduarnos. Tambien hemos hecho algunas pruebas para probar nuevos bloques de programacion.
domingo, 2 de mayo de 2021
Robot- Salida3
Salida 3:
En la tercera salida el robot gira la ruleta hasta el color verde oscuro (M11) y deja la rueda libre dentro del círculo pequeño (M12).
En total son 60 puntos.
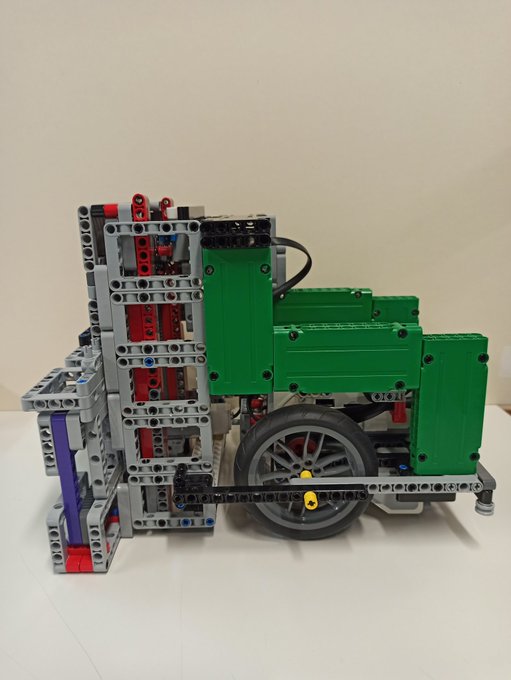
Cuna



La cuna utiliza un gancho en la parte trasera que arrastra la rueda libre al círculo pequeño. Para mover la ruleta utiliza una rueda que gira gracias a una cadena de engranajes que trasladan el movimiento del motor a la rueda. Tiene una caja a un lado con ruedines para que vaya contra la pared.
Robot- Salida 4
Salida 4:
La cuarta salida consiste en empujar el contador de pasos hasta el color azul (M02), pasar bajo el larguero (M06) y bailar en la pista (M07).
En total serían 110 puntos.
Cuna:



Esta cuna utiliza pneumáticos. Cuando el robot choca contra el contador de pasos libera el pneumático gracias al aire comprimido y permite que el robot siga avanzando y lo empuje hasta la zona azul. Tiene unos ruedines para que vaya apoyado contra a pared. En esta cuna el robot va en horizontal en vez de en vertical, eso nos permite pasar bajo el larguero sin chocarnos.
sábado, 1 de mayo de 2021
Robot- Salida 2
Salida 2:
En total son 110 puntos.
Cuna:
Para esta salida se utiliza la siguiente cuna:



Para conseguir movimiento, al chocar contra el banco deja caer cada bloque en su cuadrado. Tiene una pieza inclinada para tirar el banco y delante del todo unas piezas que recogen el respaldo.
Programación
Consiste en un avance y un retroceso. Es muy simple ya que no necesita motores.

sábado, 16 de mayo de 2020
Avances con la digitalización de los artilugios
Estos dias hemos seguido digitalizando los artilugios de nuestro robot, utilizando stud.io.




sábado, 18 de abril de 2020
Aprendemos a manejar Stud.io
Estos días estamos aprendiendo a manejar el programa Stud.io. Estamos empezando a construir una pequeña ciudad. Hemos visto que se puede importar modelos de robot.


miércoles, 5 de febrero de 2020



lunes, 3 de febrero de 2020


viernes, 31 de enero de 2020
Salidas del robot
En nuestro canal Youtube, www.youtube.com/user/TecnoClubElburgo, pueden verse los vídeos que hemos realizado de las salidas que hace nuestro robot en el reto CityShaper.
viernes, 27 de diciembre de 2019
sábado, 2 de noviembre de 2019
La evolución del robot
El robot que vamos a utilizar para este año lo sacamos de aquí: https://www.flickr.com/photos/42988571@N08/16295825653
Le hemos hecho varias mejoras:


- Hemos sustituido los ruedines que tenia por una bola.
- También hemos cambiado el motor pequeño por el giro-sensor.
- Hemos bajado un punto la pieza central para poder enganchar el cable de alimentación.
- Le vamos a añadir una doble fenwick.




sábado, 8 de diciembre de 2018






jueves, 6 de diciembre de 2018
Jueves 6 de diciembre
Hoy hemos avanzado bastante en el robot y cada grupo se ha organizado para hacer sus misiones.








domingo, 2 de diciembre de 2018
Sesión del Sábado 1 de Diciembre
Hoy hemos trabajado muy centrados en el robot. En primer lugar Laura nos ha enseñado unos vídeos de otros equipos haciendo unas misiones de robot.
Luego hemos empezado a trabajar en las diversas misiones del juego del robot. Olivia y Julia han conseguido hacer la M01 ( solo el primer carrito).
Erlaitz y Elena han comenzado ha fabricar los artilugios de las misiones M05, M06 y M07.
Laura ha terminado de programar un bloque de avance en centímetros.
Luego hemos empezado a trabajar en las diversas misiones del juego del robot. Olivia y Julia han conseguido hacer la M01 ( solo el primer carrito).
Erlaitz y Elena han comenzado ha fabricar los artilugios de las misiones M05, M06 y M07.
Laura ha terminado de programar un bloque de avance en centímetros.
sábado, 24 de noviembre de 2018
Sesión del 24 de noviembre: a toda máquina
 |
| Acabamos de montar las dos base de robot |
 |
| Empezamos a preguntar a expertos |
 |
| Pronto empezaremos a completar misiones |
sábado, 17 de noviembre de 2018
Los roles de los miembros del equipo
Hoy hemos repartido los roles de los miembros del equipo.
Cada uno tiene su rol, aunque por tener ese rol no significa que solo trabaje en eso significa que su responsabilidad de que la tarea se realice correctamente. Pero los demás también participan.
- La directora del proyecto es Julia.
- La directora artística es Olivia.
- El director jurídico es Erlaitz.
- La directora de programación y de espionaje es Laura.
- La directora de estrategia del juego del robot es Elena.
- La directora de comunicación es Irati.
Bloques reutilizables que vamos a crear
Hoy hemos decidido cuales van a ser los bloques reutilizables que vamos a crear para facilitar y mejorar la programación del robot, que son estos:
- Avance recto en centímetros
- Sigue-líneas
- Arranque/parada en rampa
- Parar en paralelo frente a una línea
sábado, 27 de octubre de 2018
Evolución del robot
En la tarde de hoy hemos avanzado en el robot tanto en la programación como en la tarea de montarlo.
Por parte de la programación, hemos programado un avance con regulación proporcional con ayuda del gyrosensor y un sigue-lineas con regulación proporcional e integral.
 Por otro lado, hemos avanzado en la construcción del robot. Como todos los años vamos a crear dos robots iguales para avanza más rápido y hoy, hemos montado ambos a la mitad.
Por otro lado, hemos avanzado en la construcción del robot. Como todos los años vamos a crear dos robots iguales para avanza más rápido y hoy, hemos montado ambos a la mitad.



Por parte de la programación, hemos programado un avance con regulación proporcional con ayuda del gyrosensor y un sigue-lineas con regulación proporcional e integral.




Suscribirse a:
Entradas (Atom)